
Úvod
Na této stránce jsou uvedeny definice tzv. infinitesimální deformace.Jedná se o poněkud nesprávný název, protože jak uvidíme v části malá deformace.html, jsou to vlastně rotace, které musí být malé, nikoliv samotné deformace, aby bylo možné přesně použít rovnice pro malé deformace.
Normální deformace
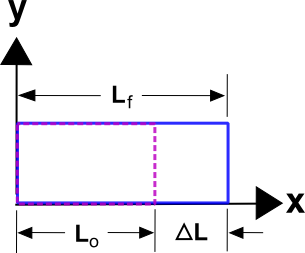
Normální ve slově normální deformace neznamená běžná, nebo obvyklá deformace. Znamená přímé délkově se měnící protažení (nebo stlačení) předmětuvyplývající z normálového napětí. Běžně se definuje jako
\
kde jsou veličiny definovány v náčrtu. Je také známá jako inženýrská deformace. Všimněte si, že když je \(\Delta L\) malé, pak\(L_o\) bude tak blízko k \(L_f\), že uvedení jednoho z nich ve jmenovateli \(\Delta L / L\) je ve skutečnosti zbytečné. To budeme předpokládat na celé této stránce.
Definice vyplývá ze skutečnosti, že pokud je lano dlouhé 1 m nataženo a selže poté, co se natáhne o 0,015 m, pak bychom očekávali, že lano dlouhé 10 m se natáhne o 0,15 m dříve, než selže. V každém případě je deformace\(\epsilon\) = 0,015 neboli 1,5 % a je konstantní hodnotou nezávislou na délce lana, přestože \(\Delta L’s\) jsou v obou případech různé hodnoty. Stejně tak by se zjistilo, že síla potřebná k natažení lana o dané množství závisí pouze na deformaci v laně.Právě tento základní koncept deformace činí tuto definici užitečnou volbou.
Smykové deformace
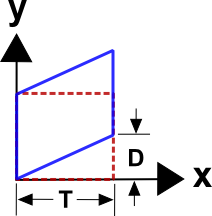
Smyková deformace se obvykle vyjadřuje pomocí \(\gamma\) a je definována jako
\
Jedná se o smykovou verzi inženýrské deformace.Všimněte si, že tato situace zahrnuje určitou rotaci tuhého tělesa, protože čtverec zde má tendenci otáčet se proti směru hodinových ručiček, ale tuto komplikaci budeme prozatím ignorovat.
Čisté smykové deformace
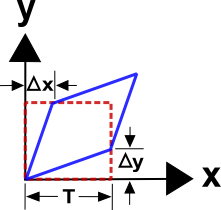
Takže lepší, ale o něco složitější definice smykové deformace je
\
kde se předpokládá, že výchozím bodem je také čtverec. Je třeba poznamenat, že obě definice vedou ke stejným výsledkům, pokud jsou posuny a deformace malé. Jinými slovy
\
To umožňuje uvažovat v termínech první definice při použití druhé.
Všeobecné definice
Výše uvedené definice jsou dobré v tom, že fungují pro jednoduché případy, ve kterých je veškerá deformace jedna nebo druhá (normálová nebo smyková). Jakmile jsou však současně přítomny složky deformace pro \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\) atd., může se situace stát nezvládnutelnou. Proto je zapotřebí obecnější metoda výpočtu.
Odpovědí na toto dilema je… kalkulus. Přístup spočívá v definování různých deformaci v termínech parciálních derivací pole posunutí, \({\bf u({\bf X})}\), takovým způsobem, aby výše uvedené definice byly zachovány pro jednoduché případy.
Normální deformace
Normální deformace jsou definovány jako
\
Jednoduchý případ jednoosého protažení lze popsat jako
\
a protože \({\bf u} = {\bf x} – {\bf X}\), lze použít trochu algebry a získat
\\
Takže
\
, což reprodukuje definici „delta L nad L“ podle potřeby.
Smykové deformace
Rovnice pro smykovou deformaci je
\
Rovnice mapování souřadnic pro příklad smyku je
\
A pole posunutí je
\
Smyková deformace je
\
To reprodukuje požadovaný výsledek pro tento jednoduchý případ:
Symetrie rovnice také zajišťuje, že vypočtená hodnota smyku také splňuje kritérium bez síťové rotace. Souřadnicové mapovací rovnice pro tento příklad jsou
\
a vedou k
\
, což opět dává požadovaný výsledek.
2-D notace
Natržení je stejně jako napětí tenzor. A stejně jako napětí je deformace tenzorem jednoduše proto, že se řídí standardními principy transformace souřadnic tenzorů. lze ji zapsat v některém z několika různých tvarů takto. Všechny jsou shodné.
\=\left=\left\]
Ale protože \(\gamma_{xy} = \gamma_{yx}\), lze všechny tenzory zapsat také jako
\=\left=\left\]
Nastavení \(\gamma_{xy} = \gamma_{yx}\) má za následek, že tenzory deformace jsou symetrické (což ve skutečnosti vyžaduje).

Tenzorové smykové členy
VELMI DŮLEŽITÉ: Smykové členy zde mají vlastnost, která je společná všem straindefinicím a je nekonečným zdrojem zmatků a chyb. Smykové členy v tenzoru jsou polovinou technických hodnot smykové deformace definovaných dříve jako\(\gamma_{xy} = D / T\). To je přijatelné a dokonce nezbytné pro správné provádění souřadnicových transformací tenzorů deformace. Nicméně tenzorové smykové členy se zapisují jako \(\epsilon_{ij}\) a jsou polovinou \(\gamma_{ij}\), takže
\
Vždy, vždy, vždy platí, že pokud \(\gamma_{xy} = D / T = 0.10\), pak tenzor deformace bude obsahovat
\\]
Alternativně, pokud tenzor deformace je
\\]
tak \(\gamma_{xy} = D / T = 0,04\).
3-D Notace
Všechny výše uvedené konvence pro 2-D platí i pro 3-D případ. Zápis pro 3-D případ je následující.
\=\left=\left\]
Vyloučení rotací tuhého tělesa z tenzoru deformace vede k\(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\) a\(\gamma_{yz} = \gamma_{zy}\).To také vytváří symetrické tenzory.
\=\left=\left\]
.