
Indledning
Denne side præsenterer de såkaldte infinitesimale belastningsdefinitioner.Dette er lidt af en misvisende betegnelse, for som vi vil se i insmallstrain.html, er det faktisk rotationer, der skal være små, ikke selve belastningerne, for at man præcist kan bruge de små belastningsligninger.
Normale belastninger
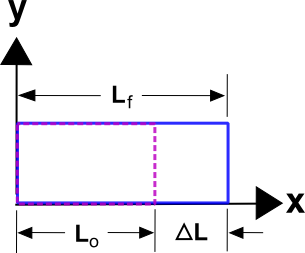
Normal i normal belastning betyder ikke almindelig, eller sædvanlig belastning. Det betyder en direkte længdeændrende strækning (eller kompression) af et objekt som følge af en normal belastning. Den er almindeligvis defineret som
\
hvor størrelserne er defineret i skitsen. Dette er også kendt som “Engineering Strain”. Bemærk, at når \(\Delta L\) er lille, vil \(L_o\) ligge så tæt på \(L_f\), at det faktisk er unødvendigt at angive en af dem i nævneren af \(\Delta L / L\). Dette vil blive antaget at være tilfældet på hele denne side.
Definitionen skyldes, at hvis et 1 m langt reb trækkes og svigter, efter at det har strakt sig 0,015 m, så forventer vi, at et 10 m langt reb strækker sig 0,15 m, før det svigter. I begge tilfælde er strækningen \(\epsilon\) = 0,015 eller 1,5% og er en konstant værdi uafhængig af rebets længde, selv om \(\Delta L’s\) er forskellige værdier i de to tilfælde. På samme måde vil den kraft, der kræves for at strække et reb med en given mængde, kun afhænge af spændingen i rebet, og det er dette grundlæggende begreb om spænding, der gør denne definition nyttig.
Shear Strains
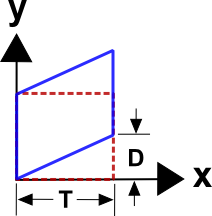
Shear strain er normalt repræsenteret ved \(\gamma\) og defineret som
\
Dette er shear-versionen af teknisk strain.Bemærk, at denne situation omfatter en vis rotation af det stive legeme, fordi kvadratet har en tendens til at rotere mod uret her, men vi vil se bort fra denne komplikation for nu.
Rene forskydningsbelastninger
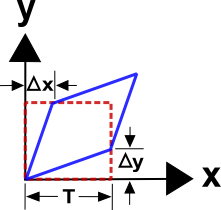
En bedre, men lidt mere kompleks definition af forskydningsbelastning er
hvor det antages, at udgangspunktet også er et kvadrat. Det skal bemærkes, at de to definitioner fører til de samme resultater, når forskydningerne og belastningerne er små. Med andre ord
Dette gør det muligt at tænke i den første definition, mens man bruger den anden.
Generelle definitioner
De ovenstående definitioner er gode, idet de fungerer for simple tilfælde, hvor alle belastninger er den ene eller den anden (normal- eller forskydningsbelastning). Men så snart der samtidig er belastningskomponenter til stede for \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\), osv. kan tingene blive uoverskuelige. Så der er behov for en mere generel beregningsmetode.
Svaret på dette dilemma er… regning. Fremgangsmåden er at definere de forskellige belastningeri form af partielle afledninger af forskydningsfeltet, \({\bf u({\bf X})}\),på en sådan måde, at ovenstående definitioner bevares for de enkle tilfælde.
Normale deformationer
De normale deformationer defineres som
Det simple tilfælde af ensidig strækning kan beskrives som
og da \({\bf u} = {\bf x} – {\bf X}}\), kan man ved hjælp af lidt algebra få
So
som gengiver “delta L over L”-definitionen som ønsket.
Skubbelastninger
Ligningen for skubbelastning er
\
Koordinatkortlægningsligningen for skubeksemplet er
Og forskydningsfeltet er
Skubbelastningen er
Dette gengiver det ønskede resultat for dette enkle tilfælde: \(\gamma_{xy} = D / T\).
Symmetrien i ligningen sikrer også, at den beregnede forskydningsværdi også opfylder kriteriet om nul-net-rotation. Koordinatafbildningsligningerne for dette eksempel er
og de fører til
som igen giver det ønskede resultat.
2-D Notation
Strækningen er ligesom spændingen en tensor. Og ligesom spænding er deformationen en tensor, simpelthen fordi den adlyder standardkoordinattransformationsprincipperne for tensorer.Den kan skrives i en af flere forskellige former som følger. De er alle identiske.
\=\left=\left\]
Men da \(\gamma_{xy} = \gamma_{yx}\), kan alle tensorer også skrives som
\=\left=\left\\left\]
Sætningen \(\gamma_{xy} = \gamma_{yx}\) har den virkning at gøre (hvilket faktisk er et krav), at de spændingsmæssige tensorer er symmetriske.

Tensors forskydningstermer
MEGET VIGTIGT: Forskydningstermerne her besidder en egenskab, der er fælles for alle straindefinitioner og er en uendelig kilde til forvirring og fejltagelser. Skydetermerne i straintensoren er halvdelen af de tekniske værdier for forskydningsspænding, der tidligere er defineret som\(\gamma_{xy} = D / T\). Dette er acceptabelt og endog nødvendigt for at kunne udføre koordinattransformationer af strain tensorer korrekt. Ikke desto mindre skrives tensorielle forskydningstermer som \(\epsilon_{ij}\) og er halvdelen af \(\gamma_{ij}\), således at
\
Det er altid, altid, altid, altid tilfældet, at hvis \(\gamma_{xy} = D / T = 0.10\), så vil spændingstensoren indeholde
\\\]
Alternativt, hvis spændingstensoren er
\\]
så er \(\gamma_{xy} = D / T = 0,04\).
3-D Notation
Alle ovenstående konventioner i 2-D gælder også for 3-D tilfældet. Notationen for 3D-tilfældet er som følger.
\=\left=\left\]
Udelukkelsen af stive legemsrotationer fra belastningstensoren fører til\(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\), og\(\gamma_{yz} = \gamma_{zy}\).Dette giver også symmetriske tensorer.
\=\left=\left\]