
Einführung
Diese Seite stellt die so genannten infinitesimalen Dehnungsdefinitionen vor, die, wie wir inmallstrain.html sehen werden, sind es eigentlich die Rotationen, die klein sein müssen, nicht die Dehnungen selbst, um die Gleichungen für kleine Dehnungen genau anwenden zu können.
Normale Dehnungen
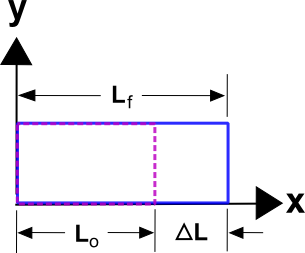
Normal bedeutet in normaler Dehnung nicht die übliche oder gewöhnliche Dehnung. Es bedeutet eine direkte längenverändernde Dehnung (oder Stauchung) eines Objekts, die aus einer Normalspannung resultiert. Sie ist allgemein definiert als
\
, wobei die Größen in der Skizze definiert sind. Dies wird auch als technische Dehnung bezeichnet. Wenn \(\Delta L\) klein ist, liegt \(L_o\) so nahe an \(L_f\), dass die Angabe einer der beiden Größen im Nenner von \(\Delta L / L\) eigentlich unnötig ist. Die Definition ergibt sich aus der Tatsache, dass, wenn ein 1 m langes Seil gezogen wird und versagt, nachdem es sich um 0,015 m gedehnt hat, man erwarten würde, dass ein 10 m langes Seil sich um 0,15 m dehnt, bevor es versagt. In beiden Fällen beträgt die Dehnung 0,015 oder 1,5 % und ist ein konstanter Wert, der unabhängig von der Seillänge ist, auch wenn die Werte für \(\Delta L’s\) in beiden Fällen unterschiedlich sind. Ebenso würde die Kraft, die erforderlich ist, um ein Seil um einen bestimmten Betrag zu dehnen, nur von der Dehnung des Seils abhängen.Es ist dieses grundlegende Konzept der Dehnung, das diese Definition zu einer nützlichen Wahl macht.
Scherdehnungen
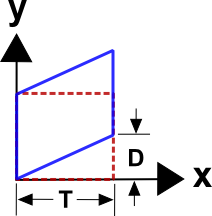
Die Scherdehnung wird gewöhnlich durch \(\gamma\) dargestellt und ist definiert als
\
Dies ist die Scher-Version der technischen Dehnung.Beachten Sie, dass diese Situation eine gewisse Drehung des starren Körpers beinhaltet, da das Quadrat hier dazu neigt, sich gegen den Uhrzeigersinn zu drehen, aber wir werden diese Komplikation vorerst ignorieren.
Reine Scherdehnung
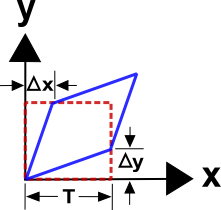
Eine bessere, aber etwas kompliziertere Definition der Scherdehnung ist also
, wobei angenommen wird, dass der Ausgangspunkt ebenfalls ein Quadrat ist. Es sei darauf hingewiesen, dass die beiden Definitionen zu den gleichen Ergebnissen führen, wenn die Verschiebungen und Dehnungen klein sind. Mit anderen Worten
\
Das erlaubt es, in der ersten Definition zu denken, während man die zweite verwendet.
Allgemeine Definitionen
Die obigen Definitionen sind insofern gut, als sie für einfache Fälle funktionieren, in denen alle Dehnungen die eine oder die andere ist (Normal oder Scherung). Sobald jedoch die Dehnungskomponenten gleichzeitig für \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\) usw. vorhanden sind, können die Dinge unüberschaubar werden. Daher wird eine allgemeinere Berechnungsmethode benötigt.
Die Antwort auf dieses Dilemma ist… die Infinitesimalrechnung. Der Ansatz besteht darin, die verschiedenen Dehnungen als partielle Ableitungen des Verschiebungsfeldes, \({\bf u({\bf X})}\), zu definieren, und zwar so, dass die obigen Definitionen für die einfachen Fälle erhalten bleiben.
Normale Dehnungen
Die normalen Dehnungen sind definiert als
\
Der einfache Fall der einachsigen Dehnung kann beschrieben werden als
\
und da \({\bf u} = {\bf x} – {\bf X}\), kann ein wenig Algebra angewandt werden, um
\
So
\
zu erhalten, was die Definition des „Delta L über L“ wie gewünscht wiedergibt.
Scherdehnung
Die Gleichung für die Scherdehnung lautet
\
Die Koordinatenabbildungsgleichung für das Scherbeispiel lautet
\
Und das Verschiebungsfeld lautet
\
Die Scherdehnung ist
\
Dies reproduziert das gewünschte Ergebnis für diesen einfachen Fall:
Die Symmetrie der Gleichung stellt außerdem sicher, dass der berechnete Scherwert auch das No-Net-Rotation-Kriterium erfüllt. Die Koordinatenabbildungsgleichungen für dieses Beispiel sind
\
und sie führen zu
\
, was wiederum das gewünschte Ergebnis liefert.
2-D-Notation
Die Dehnung ist, wie die Spannung, ein Tensor. Und wie die Spannung ist auch die Dehnung ein Tensor, weil sie den Standard-Koordinatentransformationsprinzipien von Tensoren gehorcht und in einer der folgenden Formen geschrieben werden kann. Sie sind alle identisch.
\=\left=\left\]
Aber da \(\gamma_{xy} = \gamma_{yx}\), können alle Tensoren auch geschrieben werden als
\=\left=\left\]
Das Setzen von \(\gamma_{xy} = \gamma_{yx}\) bewirkt, dass die Dehnungstensoren symmetrisch werden (was in der Tat erforderlich ist).

Tensor-Scherterme
SEHR WICHTIG: Die Scherungsterme hier besitzen eine Eigenschaft, die allen Straindefinitionen gemeinsam ist und eine endlose Quelle von Verwirrung und Fehlern darstellt. Die Scherungsterme im Dehnungsintensor sind die Hälfte der technischen Scherdehnungswerte, die zuvor als\(\gamma_{xy} = D / T\) definiert wurden. Dies ist akzeptabel und sogar notwendig, um Koordinatentransformationen an Dehnungstensoren korrekt durchführen zu können. Tensorielle Scherungsterme werden jedoch als \(\epsilon_{ij}\) geschrieben und sind die Hälfte von \(\gamma_{ij}\), so dass
\
Es ist immer, immer, immer der Fall, dass \(\gamma_{xy} = D / T = 0.10\), dann enthält der Dehnungstensor
\\]
Alternativ dazu, wenn der Dehnungstensor
\\]
ist, dann ist \(\gamma_{xy} = D / T = 0,04\).
3-D Notation
Alle oben genannten Konventionen im 2-D Fall gelten auch für den 3-D Fall. Die Notation für den 3-D-Fall lautet wie folgt.
\=\left=\left\]
Der Ausschluss von Starrkörperrotationen aus dem Dehnungstensor führt zu\(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\), und\(\gamma_{yz} = \gamma_{zy}\).Dadurch entstehen auch symmetrische Tensoren.
\=\left=\left\]