
Introducción
Esta página presenta las llamadas definiciones de deformaciones infinitesimales.html, en realidad son las rotaciones las que tienen que ser pequeñas, no las deformaciones en sí, para poder utilizar con precisión las ecuaciones de las deformaciones pequeñas.
Deformaciones normales
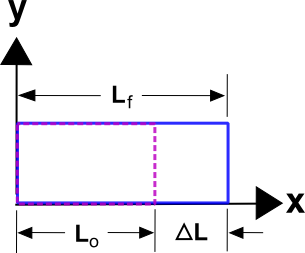
Normal en deformación normal no significa deformación común, o habitual. Significa un estiramiento (o compresión) que cambia directamente la longitud de un objeto como resultado de una tensión normal. Se define comúnmente como
\
donde las cantidades se definen en el croquis. También se conoce como deformación de ingeniería. Tenga en cuenta que cuando \(\Delta L\) es pequeño, entonces\(L_o\) estará tan cerca de \(L_f\) que la especificación de cualquiera de ellos en eldenominador de \(\Delta L / L\) es innecesaria, de hecho. La definición surge del hecho de que si se tira de una cuerda de 1 m de longitud y ésta falla después de estirarse 0,015 m, entonces se espera que una cuerda de 10 m se estire 0,15 m antes de fallar. En cada caso, la tensión es (\epsilon\) = 0,015, es decir, el 1,5%, y es un valor constante e independiente de la longitud de la cuerda, aunque el \ (\Delta L’s\) sea diferente en los dos casos. Del mismo modo, la fuerza necesaria para estirar una cuerda en una cantidad determinada dependerá únicamente de la tensión de la cuerda.
Deformación por cizallamiento
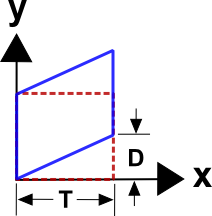
La deformación por cizallamiento se suele representar por \(\gamma\) y se define como
\
Esta es la versión por cizallamiento de la deformación de ingeniería.Tenga en cuenta que esta situación incluye cierta rotación del cuerpo rígido porque el cuadrado tiende a girar en sentido contrario a las agujas del reloj, pero ignoraremos esta complicación por ahora.
Deformación de cizalladura pura
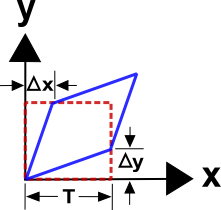
Por lo tanto, una definición mejor, aunque un poco más compleja, de la deformación de cizalladura es
en la que se supone que el punto de partida es también un cuadrado. Hay que señalar que las dos definiciones conducen a los mismos resultados cuando los desplazamientos y las deformaciones son pequeños. En otras palabras
\
Esto permite pensar en términos de la primera definición mientras se utiliza la segunda.
Definiciones generales
Las definiciones anteriores son buenas en el sentido de que funcionan para casos simples en los que toda la deformación es una u otra (normal o cortante). Pero tan pronto como los componentes de deformación están presentes simultáneamente para \ (\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\), etc., las cosas pueden llegar a ser inmanejable. Así que se necesita un método de cálculo más general.
La respuesta a este dilema es… el cálculo. El enfoque consiste en definir las distintas tensiones en términos de derivadas parciales del campo de desplazamiento, \({\bf u({\bf X})}\), de tal manera que las definiciones anteriores se conservan para los casos sencillos.
Deformación normalLas deformaciones normales se definen como
\
El caso simple de estiramiento uniaxial puede describirse como
\
y como \({\bf u} = {\bf x} – {\bf X}\), se puede aplicar un poco de álgebra para obtener
\
Así que
\
que reproduce la definición de «delta L sobre L» como se desea.
Deformación de cizallamientoLa ecuación de la deformación de cizallamiento es
\8177>La ecuación de mapeo de coordenadas para el ejemplo de cizallamiento es
\8177>Y el campo de desplazamiento es
\8177>La deformación de cizallamiento es
\8177>Esto reproduce el resultado deseado para este caso simple: \La simetría de la ecuación también asegura que el valor de cizallamiento calculado también satisface el criterio de no-rotación. Las ecuaciones de mapeo de coordenadas para este ejemplo son
\
y conducen a
\
que de nuevo produce el resultado deseado.
Notación 2-D
La deformación, como la tensión, es un tensor. Y al igual que la tensión, la deformación es un tensor simplemente porque obedece a los principios estándar de transformación de coordenadas de los tensores. Todas son idénticas.
\=\left=\left\]
Pero como \(\gamma_{xy} = \gamma_{yx}\) todos los tensores también pueden escribirse como
=\left=\left]
Establecer \(\gamma_{xy} = \gamma_{yx}} tiene el efecto de hacer (exigir de hecho) que los tensores de deformación sean simétricos.

Términos de cizalladura de los tensores MUY IMPORTANTE: Los términos de cizalladura aquí poseen una propiedad que es común en todas las definiciones de tensión y es una fuente inagotable de confusión y errores. Los términos de cizallamiento en el tensor son la mitad de los valores de deformación de cizallamiento de ingeniería definidos anteriormente como (\gamma_{xy} = D / T\). Esto es aceptable e incluso necesario para realizar correctamente las transformaciones de coordenadas en los tensores de deformación. Sin embargo, los términos de cizallamiento tensorial se escriben como \(\epsilon_{ij}\) y son la mitad de \(\gamma_{ij}\) tal que
\
Siempre, siempre, siempre ocurre que si \(\gamma_{xy} = D / T = 0.10\), entonces el tensor de deformación contendrá
\]
Alternativamente, si el tensor de deformación es
\]
entonces \(\gamma_{xy} = D / T = 0,04\).
Notación en 3-D
Todas las convenciones anteriores en 2-D también se aplican al caso 3-D. La notación para el caso de 3-D es la siguiente.
[izquierda][izquierda]
La exclusión de las rotaciones del cuerpo rígido del tensor de deformación conduce a (gamma_{xy} = gamma_{yx}), (gamma_{x} = gamma_{zx}), y (gamma_{yz} = gamma_{zy}).Esto también produce tensores simétricos.
\N- Izquierda=\N-Izquierda]