
Esittely
Tällä sivulla esitellään niin sanotut infinitesimaalisen kannan määritelmät.Tämä on hieman harhaanjohtava nimitys, sillä kuten tulemme näkemään pienen kannan määritelmissä.html, itse asiassa juuri rotaatioiden on oltava pieniä, ei itse rasitusten, jotta pienten rasitusten yhtälöitä voidaan käyttää tarkasti.
Normaalit rasitukset
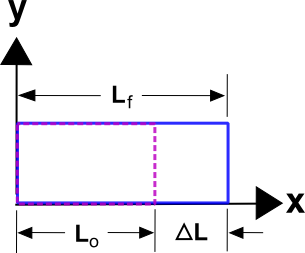
Normaalissa rasituksessa normaali ei tarkoita tavanomaista tai tavallista rasitusta. Se tarkoittaa kappaleen suoraa pituutta muuttavaa venytystä (tai puristusta), joka on seurausta normaalijännityksestä. Se määritellään yleisesti muodossa
\
, jossa suureet on määritelty luonnoksessa. Tämä tunnetaan myös nimelläEngineering Strain. Huomaa, että kun \(\Delta L\) on pieni, niin\(L_o\) on niin lähellä \(L_f\), että jommankumman määrittely \(\Delta L / L\):n nimittäjässä on itse asiassa tarpeetonta. Näin oletetaan olevan koko tämän sivun ajan.
Määritelmä johtuu siitä, että jos 1 metrin pituista köyttä vedetään ja se pettää sen jälkeen, kun se on venynyt 0,015 metriä, 10 metrin köyden odotetaan venyvän 0,15 metriä ennen kuin se pettää. Kummassakin tapauksessa venymä on \(\epsilon\) = 0,015 eli 1,5 %, ja se on vakioarvo, joka on riippumaton köyden pituudesta, vaikka \(\Delta L’s\) on eri arvo näissä kahdessa tapauksessa. Samoin voima, joka tarvitaan köyden venyttämiseen tietyllä määrällä, riippuisi vain köydessä olevasta venymästä.Juuri tämä venymän peruskäsite tekee tästä määritelmästä hyödyllisen valinnan.
Seurajännitykset
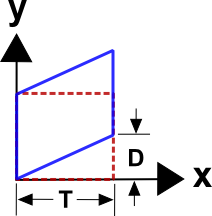
Seurajännitys esitetään yleensä muodossa \(\gamma\), ja se määritellään seuraavasti:
\
Tämä on teknisen jännityksen leikkausversio.Huomaa, että tähän tilanteeseen sisältyy jonkin verran jäykän kappaleen rotaatiota, koska neliöllä on tässä tapauksessa taipumus pyöriä vastapäivään, mutta emme toistaiseksi huomioi tätä monimutkaisuutta.
Puhtaat leikkausjännitykset
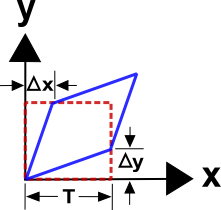
Siten parempi, mutta hieman monimutkaisempi leikkausjännityksen määritelmä on
\
jossa oletetaan, että lähtöpiste on myös neliö. On huomattava, että molemmat määritelmät johtavat samoihin tuloksiin, kun siirtymät ja muodonmuutokset ovat pieniä. Toisin sanoen
\
Tämä mahdollistaa sen, että voidaan ajatella ensimmäisen määritelmän mukaisesti ja käyttää toista määritelmää.
Yleisiä määritelmiä
Yllä olevat määritelmät ovat hyviä siinä mielessä, että ne toimivat yksinkertaisissa tapauksissa, joissa kaikki rasitukset ovat jompaakumpaa (normaali tai leikkaus). Mutta heti kun rasituskomponentit ovat samanaikaisesti läsnä \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\) jne., asiat voivat muuttua hallitsemattomiksi. Tarvitaan siis yleisempi laskutapa.
Vastaus tähän dilemmaan on… matematiikka. Lähestymistapa on määritellä eri rasitukset siirtymäkentän osittaisderivaattojen \({\bf u({\bf X})}\) avulla siten, että edellä mainitut määritelmät säilyvät yksinkertaisissa tapauksissa.
Normaalijännitykset
Normaalijännitykset määritellään seuraavasti
\
Yksinkertainen yksiakselisen venytyksen tapaus voidaan kuvata seuraavasti
\
ja koska \({\bf u} = {\bf x} – {\bf X}\), pienellä algebralla saadaan
\
So
\
, joka vastaa ”delta L yli L” -määritelmää halutulla tavalla.
Leikkausjännitykset
Leikkausjännityksen yhtälö on
\
Koordinaattikuvausyhtälö leikkausesimerkille on
\
Ja siirtymäkenttä on
Leikkausjännitys on
\
Tämä toistaa halutun tuloksen tässä yksinkertaisessa tapauksessa:
Yhtälön symmetria takaa myös sen, että laskettu leikkausarvo täyttää myös ei-verkkokiertokriteerin. Tämän esimerkin koordinaattikuvausyhtälöt ovat
\
ja ne johtavat
\
, mikä taas tuottaa halutun tuloksen.
2-D merkintätapa
Vetovoima on jännityksen tavoin tensori. Ja kuten jännitys, myös venymä on tensori yksinkertaisesti siksi, että se noudattaa tensoreiden tavanomaisia koordinaattimuunnosperiaatteita.Se voidaan kirjoittaa jossakin monista eri muodoista seuraavasti. Ne ovat kaikki samanlaisia.
\=\left=\left\]
Mutta koska \(\gamma_{xy} = \gamma_{yx}\), kaikki tensorit voidaan kirjoittaa myös muodossa
\=\\left=\left\]
Asettamalla \(\gamma_{xy} = \gamma_{yx}\) saadaan (itse asiassa edellytetään), että rasitustensorit ovat symmetrisiä.

Tensorien leikkaustermit
ERITTÄIN TÄRKEÄÄ: Tässä esitetyillä leikkaustermeillä on ominaisuus, joka on yhteinen kaikille kantamääritelmille ja joka on loputon sekaannusten ja virheiden lähde. Straintensorin leikkaustermit ovat puolet aiemmin määritellyistä teknisistä leikkausjännitysarvoista \(\gamma_{xy} = D / T\). Tämä on hyväksyttävää ja jopa välttämätöntä, jotta venymätensoreiden koordinaattimuunnokset voidaan suorittaa oikein. Kuitenkin tensoriset leikkaustermit kirjoitetaan muodossa \(\epsilon_{ij}\) ja ne ovat puolet \(\gamma_{ij}\) siten, että
\
On aina, aina, aina, aina niin, että jos \(\(\gamma_{xy} = D / T = 0.10\), niin venymätensori sisältää
\\\]
Vaihtoehtoisesti, jos venymätensori on
\\\]
tällöin \(\gamma_{xy} = D / T = 0.04\).
Kolmiulotteinen merkintätapa
Kaikki edellä esitetyt 2-D:n konventiot pätevät myös kolmiulotteisessa tapauksessa. Kolmiulotteisen tapauksen merkintätavat ovat seuraavat.
\=\left=\left\]
Jäykän kappaleen rotaatioiden jättäminen pois venymätensorista johtaa \(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\) ja\(\gamma_{yz} = \gamma_{zy}\).Näin saadaan myös symmetriset tensorit.
\=\\left=\left\]