
Introduction
Cette page présente les définitions dites de déformation infinitésimale.C’est un peu un terme impropre car comme nous le verrons dansmallstrain.html, ce sont en fait les rotations qui doivent être petites, et non les déformations elles-mêmes, afin d’utiliser avec précision les équations de petites déformations.
Déformations normales
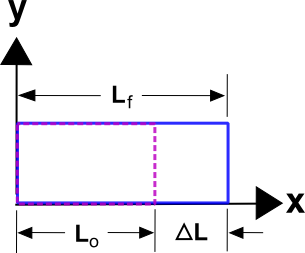
Normal dans déformation normale ne signifie pas déformation commune, ou habituelle. Elle désigne un étirement (ou une compression) direct de la longueur d’un objet résultant d’une contrainte normale. Elle est communément définie comme
\
où les quantités sont définies dans le croquis. Elle est également connue sous le nom de déformation d’ingénierie. Notez que lorsque \(\Delta L\) est petit, alors \(L_o\) sera si proche de \(L_f\) que la spécification de l’un ou l’autre dans le dénominateur de \(\Delta L / L\) est en fait inutile. La définition découle du fait que si une corde de 1 m de long est tirée et cède après s’être étirée de 0,015 m, on s’attend à ce qu’une corde de 10 m s’étire de 0,15 m avant de céder. Dans chaque cas, la déformation est\(\epsilon\) = 0,015, soit 1,5%, et est une valeur constante indépendante de la longueur de la corde, même si les \(\Delta L’s\) sont des valeurs différentes dans les deux cas. De même, on trouvera que la force nécessaire pour étirer une corde d’une quantité donnée ne dépend que de la déformation de la corde.C’est ce concept fondamental de la déformation qui fait de cette définition un choix utile.
Déformations de cisaillement
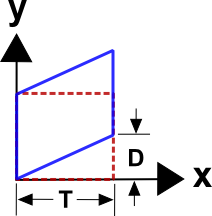
La déformation de cisaillement est généralement représentée par \(\gamma\) et définie comme
\
C’est la version de cisaillement de la déformation d’ingénierie.Notez que cette situation inclut une certaine rotation du corps rigide car le carré a tendance à tourner dans le sens inverse des aiguilles d’une montre ici, mais nous ignorons cette complication pour le moment.
Déformations de cisaillement pur
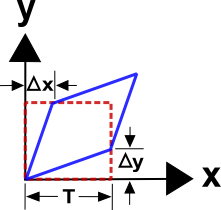
Donc une meilleure, mais légèrement plus complexe définition de la déformation de cisaillement, est
\
où l’on suppose que le point de départ est également un carré. Il faut noter que les deux définitions conduisent aux mêmes résultats lorsque les déplacements et les déformations sont faibles. En d’autres termes
\
Cela permet de penser en termes de la première définition tout en utilisant la seconde.
Définitions générales
Les définitions ci-dessus sont bonnes en ce qu’elles fonctionnent pour les cas simplesdans lesquels toutes les déformations sont l’une ou l’autre (normale ou cisaillement). Mais dès que les composantes de la déformation sont simultanément présentes pour \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\), etc, les choses peuvent devenir ingérables. Il faut donc une méthode de calcul plus générale.
La réponse à ce dilemme est… le calcul. L’approche consiste à définir les différentes déformationsen termes de dérivées partielles du champ de déplacement, \({\bf u({\bf X})}\),de telle sorte que les définitions ci-dessus soient préservées pour les cas simples.
Déformations normales
Les déformations normales sont définies comme
Le cas simple d’un étirement uniaxial peut être décrit comme
\
et puisque \({\bf u} = {\bf x} – {\bf X}\), un peu d’algèbre peut être appliquée pour donner
So
qui reproduit la définition du « delta L sur L » comme souhaité.
Déformations de cisaillement
L’équation de la déformation de cisaillement est
\
L’équation de mise en correspondance des coordonnées pour l’exemple de cisaillement est
\
Et le champ de déplacement est
\
La déformation de cisaillement est
\
Ce qui reproduit le résultat souhaité pour ce cas simple : \(\gamma_{xy} = D / T\).
La symétrie de l’équation garantit également que la valeur de cisaillement calculée satisfait également le critère de non-rotation nette. Les équations de mise en correspondance des coordonnées pour cet exemple sont
\
et elles conduisent à
\
ce qui produit à nouveau le résultat souhaité.
Notation 2D
La déformation, comme la contrainte, est un tenseur. Et comme la contrainte, la déformation est un tenseur simplement parce qu’elle obéit aux principes standard de transformation des coordonnées des tenseurs.Elle peut être écrite sous l’une des différentes formes suivantes. Elles sont toutes identiques.
\=\left=\left\]
Mais puisque \(\gamma_{xy} = \gamma_{yx}\), tous les tenseurs peuvent aussi s’écrire comme
\=\left=\left\]
La mise en place de \(\gamma_{xy} = \gamma_{yx}\) a pour effet de rendre (nécessite en fait) les tenseurs de déformation symétriques.

Termes de cisaillement des tenseurs
TRÈS IMPORTANT : Les termes de cisaillement possèdent ici une propriété commune à toutes les déformations et qui est une source inépuisable de confusion et d’erreurs. Les termes de cisaillement dans le tenseur de déformation sont la moitié des valeurs de déformation de cisaillement d’ingénierie définies plus tôt comme \(\gamma_{xy} = D / T\). Ceci est acceptable et même nécessaire pour effectuer correctement les transformations de coordonnées sur les tenseurs de déformation. Néanmoins, les termes de cisaillement tensoriels s’écrivent comme \(\epsilon_{ij}\) et sont la moitié de \(\gamma_{ij}\) tels que
\
Il est toujours, toujours, toujours le cas que si \(\gamma_{xy} = D / T = 0.10\), alors le tenseur de déformation contiendra
\\\\\]
Alternativement, si le tenseur de déformation est
\\\\]
alors \(\gamma_{xy} = D / T = 0.04\).
Notation 3-D
Toutes les conventions ci-dessus en 2-D s’appliquent également au cas 3-D. La notation pour le cas 3-D est la suivante.
\=\left=\left\]
L’exclusion des rotations du corps rigide du tenseur de déformation conduit à\(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\), et\(\gamma_{yz} = \gamma_{zy}\).Cela produit également des tenseurs symétriques.
\\N{\i1}La gauche=\left=\left\}]