
Bevezetés
Ez az oldal az úgynevezett infinitezimális törzs definíciókat mutatja be.Ez egy kicsit téves elnevezés, mert mint látni fogjuk, a kis törzsben.html, valójában a forgásoknak kell kicsinek lenniük, nem maguknak az alakváltozásoknak, hogy pontosan használhassuk a kis alakváltozási egyenleteket.
Normális alakváltozások
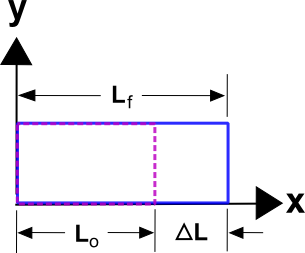
A normál alakváltozásokban a normál alakváltozások nem jelentenek közönséges, vagy szokásos alakváltozást. Egy tárgy közvetlen hosszváltozással járó nyúlását (vagy összenyomódását) jelenti, amely normális feszültség hatására keletkezik. Általában úgy határozzák meg, hogy
\
ahol a mennyiségek a vázlatban vannak meghatározva. Ezt mérnöki alakváltozásnak is nevezik. Vegyük észre, hogy ha \(\Delta L\) kicsi, akkor\(L_o\) olyan közel lesz \(L_f\), hogy az \(\Delta L / L\) nevezőjében bármelyiknek a megadása valójában szükségtelen. Ezen az oldalon végig ezt fogjuk feltételezni.
A definíció abból a tényből adódik, hogy ha egy 1 m hosszú kötelet meghúzunk, és az 0,015 m megnyúlása után meghibásodik, akkor egy 10 m hosszú kötéltől 0,15 m megnyúlást várnánk, mielőtt meghibásodik. Mindkét esetben a nyúlás \(\epsilon\) = 0,015, azaz 1,5%, és a kötél hosszától független állandó érték, még akkor is, ha a \(\Delta L’s\) a két esetben különböző értékek. Hasonlóképpen, a kötél adott mértékű megnyújtásához szükséges erő csak a kötélben lévő feszültségtől függ.A feszültségnek ez az alapvető fogalma az, ami ezt a definíciót hasznos választássá teszi.
Nyíró alakváltozások
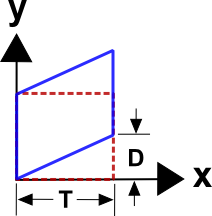
A nyíró alakváltozást általában \(\gamma\) jelöli, és a következőképpen határozzuk meg:
\
Ez a műszaki alakváltozás nyíró változata.Vegyük észre, hogy ez a helyzet tartalmaz némi merev testforgást, mivel a négyzet itt az óramutató járásával ellentétes irányban hajlamos forogni, de ezt a bonyodalmat most figyelmen kívül hagyjuk.
Tiszta nyírófeszültség
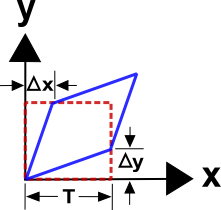
A nyírófeszültség jobb, de kissé bonyolultabb definíciója tehát a
\
, ahol feltételezzük, hogy a kiindulási pont szintén egy négyzet. Meg kell jegyezni, hogya két definíció azonos eredményre vezet, ha az elmozdulások és az alakváltozások kicsik. Más szavakkal
\\
Ez lehetővé teszi, hogy az első definícióban gondolkodjunk, miközben a másodikat használjuk.
Általános definíciók
A fenti definíciók annyiban jók, hogy egyszerű esetekben működnek, amikor minden alakváltozás az egyik vagy a másik (normál vagy nyíró). De amint az alakváltozási komponensek egyszerre vannak jelen \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\) stb. esetén, a dolgok kezelhetetlenné válhatnak. Tehát egy általánosabb számítási módszerre van szükség.
A válasz erre a dilemmára… a számtan. A megközelítés az, hogy a különböző alakváltozásokat az elmozdulási mező részleges deriváltjainak, \({\bf u({\bf X})}\),úgy definiáljuk, hogy a fenti definíciók az egyszerű esetekre megmaradnak.
Normális alakváltozások
A normális alakváltozásokat a következőképpen határozzuk meg:
\
Az egytengelyű nyújtás egyszerű esetét a következőképpen írhatjuk le:
\
és mivel \({\bf u} = {\bf x} – {\bf X}\), egy kis algebrát alkalmazva megkaphatjuk
\
So
\
, ami a kívánt módon reprodukálja a “delta L felett L” definíciót.
A nyírási alakváltozások
A nyírási alakváltozások egyenlete
\
A nyírási példa koordináta-leképezési egyenlete
\
És az elmozdulási mező
\
A nyírási alakváltozás
\
Ez reprodukálja a kívánt eredményt erre az egyszerű esetre: \(\gamma_{xy} = D / T\).
Az egyenlet szimmetriája biztosítja azt is, hogy a számított nyírási érték is kielégíti a nettó elfordulás nélküli kritériumot. A koordináta leképezési egyenletek ehhez a példához
\
és ezek
\
hoz vezetnek, ami ismét a kívánt eredményt adja.
2-D jelölés
A nyúlás, akárcsak a feszültség, egy tenzor. És a feszültséghez hasonlóan a nyúlás is tenzor, egyszerűen azért, mert engedelmeskedik a tenzorok szokásos koordinátatranszformációs elveinek.Többféle formában is leírható az alábbiak szerint. Ezek mindegyike azonos.
\=\left=\left\]
De mivel \(\gamma_{xy} = \gamma_{yx}\), az összes tenzor felírható úgy is, hogy
\=\\left=\left\]
Az \(\gamma_{xy} = \gamma_{yx}\) beállítása azt eredményezi, hogy az alakváltozási tenzorok szimmetrikusak lesznek (valójában ezt követeli meg).

Tenzor nyírási kifejezések
NAGYON FONTOS: Az itt szereplő nyírási kifejezések rendelkeznek egy olyan tulajdonsággal, amely minden straindefinícióban közös, és amely végtelenül sok zavart és hibát okoz. A nyírási kifejezések az alakváltozóban a korábban \(\gamma_{xy} = D / T\)-ként definiált mérnöki nyírási alakváltozási értékek felét jelentik. Ez elfogadható, sőt szükséges ahhoz, hogy az alakváltozási tenzorok koordinátatranszformációit helyesen végezzük el. Mindazonáltal a tenzoros nyírási kifejezések \(\epsilon_{ij}\)-ként íródnak fel, és \(\gamma_{ij}\) felét jelentik, úgy, hogy
\
Mindig, mindig, mindig, mindig az a helyzet, hogy ha \(\(\gamma_{xy} = D / T = 0.10\), akkor az alakváltozási tenzor tartalmazni fogja
\\\]
Változatlanul, ha az alakváltozási tenzor
\\\]
akkor \(\gamma_{xy} = D / T = 0.04\).
3-D jelölés
A fenti 2-D-s konvenciók a 3-D-s esetre is érvényesek. A 3-D eset jelölése a következő.
\=\left=\left\]
A merev test forgásainak kizárása az alakváltozási tenzorból a következőkhöz vezet:\(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\), és\(\gamma_{yz} = \gamma_{zy}\).Ez szintén szimmetrikus tenzorokat eredményez.
\=\\left=\left\]