
Introduzione
Questa pagina presenta le cosiddette definizioni di deformazione infinitesimale.html, sono in realtà le rotazioni che devono essere piccole, non le deformazioni stesse, per poter usare accuratamente le equazioni delle deformazioni piccole.
Tensioni normali
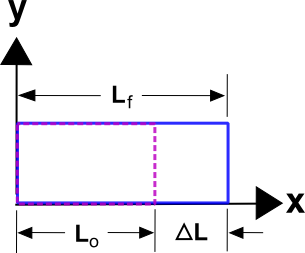
Normale in deformazione normale non significa deformazione comune, o usuale. Significa un allungamento (o compressione) diretto che cambia la lunghezza di un oggetto risultante da una sollecitazione normale. È comunemente definita come
dove le quantità sono definite nel disegno. Questo è anche conosciuto comeEngineering Strain. Si noti che quando \(\Delta L\) è piccolo, allora \(L_o\) sarà così vicino a \(L_f\) che la specificazione di entrambi nel denominatore di \(\Delta L / L\) non è necessaria, infatti. La definizione nasce dal fatto che se una corda lunga 1 m viene tirata e cede dopo essersi allungata di 0,015 m, allora ci aspetteremmo che una corda di 10 m si allunghi di 0,15 m prima di cedere. In ogni caso, la deformazione è (‗epsilon’) = 0,015, o 1,5%, ed è un valore costante indipendente dalla lunghezza della corda, anche se i ‗delta L’s’ sono valori diversi nei due casi. Allo stesso modo, la forza necessaria per allungare una corda di una data quantità si troverebbe a dipendere solo dalla deformazione della corda, ed è questo concetto fondamentale della deformazione che rende questa definizione una scelta utile.
Shear Strain
Shear Strain è solitamente rappresentato da \(\gamma\) e definito come
\
Questa è la versione al taglio della deformazione ingegneristica.
Pure Shear Strains
Quindi una migliore, ma leggermente più complessa definizione di shear strain, è
dove si assume che il punto di partenza sia anche un quadrato. Va notato che le due definizioni portano agli stessi risultati quando gli spostamenti e le deformazioni sono piccoli. In altre parole
Questo permette di pensare in termini della prima definizione mentre si usa la seconda.
Definizioni generali
Le definizioni precedenti sono buone in quanto funzionano per casi semplici in cui tutta la deformazione è una o l’altra (normale o di taglio). Ma non appena le componenti di deformazione sono simultaneamente presenti per \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}), etc., le cose possono diventare ingestibili. Quindi è necessario un metodo di calcolo più generale.
La risposta a questo dilemma è… il calcolo. L’approccio è quello di definire le varie deformazioni in termini di derivate parziali del campo di spostamento, \({\bf u({\bf X})}\), in modo tale che le definizioni di cui sopra siano conservate per i casi semplici.
Tensioni normali
Le tensioni normali sono definite come
\
Il caso semplice di stiramento monoassiale può essere descritto come
\
e poiché \({\bf u} = {\bf x} – {\bf X}), un po’ di algebra può essere applicata per dare
\
So
\
che riproduce la definizione “delta L su L” come desiderato.
Shear Strains
L’equazione per la deformazione di taglio è
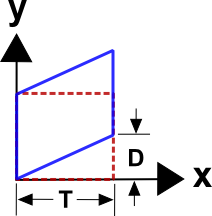
L’equazione di mappatura delle coordinate per l’esempio del taglio è
E il campo di spostamento è
La deformazione di taglio è
Questo riproduce il risultato desiderato per questo semplice caso: \(\gamma_{xy} = D / T\).
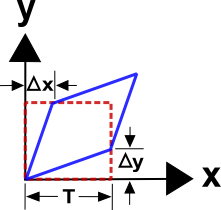
La simmetria dell’equazione assicura anche che il valore di taglio calcolato soddisfi anche il criterio di non rotazione della rete. Le equazioni di mappatura delle coordinate per questo esempio sono
\8177>e portano a
\8177>che ancora una volta produce il risultato desiderato.
Notazione 2-D
La deformazione, come lo stress, è un tensore. E come la sollecitazione, la deformazione è un tensore semplicemente perché obbedisce ai principi standard di trasformazione delle coordinate dei tensori. Sono tutte identiche.
\sinistra = \sinistra_left\]
Ma poiché \(\gamma_{xy} = \gamma_{yx}), tutti i tensori possono anche essere scritti come
==sinistra=\left\]
Impostare \(\gamma_{xy} = \gamma_{yx}) ha l’effetto di rendere (richiedere in effetti) i tensori di deformazione simmetrici.

Tenori di taglio
MOLTO IMPORTANTE: I termini di taglio qui possiedono una proprietà che è comune a tutte le definizioni di sforzo ed è una fonte infinita di confusione ed errori. I termini di taglio nel sensore di sforzo sono la metà dei valori ingegneristici di deformazione di taglio definiti in precedenza come (\gamma_{xy} = D / T\). Questo è accettabile e persino necessario per eseguire correttamente le trasformazioni di coordinate sui tensori di deformazione. Tuttavia, i termini di taglio tensoriale sono scritti come \(\epsilon_{ij}\) e sono la metà di \(\gamma_{ij}\ tale che
È sempre, sempre, sempre il caso che se \(\gamma_{xy} = D / T = 0.10\), allora il tensore di deformazione conterrà
\\\code(TM)
Alternativamente, se il tensore di deformazione è
\\code(TM)
allora \(\gamma_{xy} = D/T = 0.04\).
Notazione 3-D
Tutte le convenzioni di cui sopra in 2-D si applicano anche al caso 3-D. La notazione per il caso 3-D è la seguente.
L’esclusione delle rotazioni del corpo rigido dal tensore di deformazione porta a (\gamma_{xy} = \gamma_{yx}), (\gamma_{xz} = \gamma_{zx}) e (\gamma_{yz} = \gamma_{zy}).Questo produce anche i tensori simmetrici.
==sinistra==sinistra]
.