
Inleiding
Deze pagina presenteert de zogenaamde infinitesimale strain definities. Dit is een beetje een verkeerde benaming, want zoals we zullen zien in smallstrain.html zullen zien, zijn het eigenlijk de rotaties die klein moeten zijn, niet de spanningen zelf, om de kleine-verrekingsvergelijkingen nauwkeurig te kunnen gebruiken.
Normale spanningen
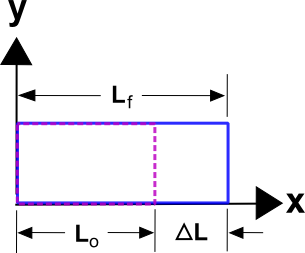
Normaal in normale spanning betekent niet gewone, of gebruikelijke spanning. Het betekent een directe lengteveranderende rek (of compressie) van een voorwerp als gevolg van een normale spanning. Het wordt gewoonlijk gedefinieerd als
waarbij de grootheden in de schets zijn gedefinieerd. Dit is ook bekend als ingenieursspanning. Merk op dat als de delta L klein is, dan ligt de delta L zo dicht bij de delta L dat de specificatie van een van beide in de noemer van de delta L / L in feite onnodig is. De definitie vloeit voort uit het feit dat als aan een touw van 1 m wordt getrokken en het bezwijkt nadat het 0,015 m is uitgerekt, dan verwachten we dat een touw van 10 m 0,15 m uitgerekt is voordat het bezwijkt. In beide gevallen is de rek 0,015, of 1,5%, en is een constante waarde onafhankelijk van de lengte van het touw, ook al zijn de waarden van de delta L’s verschillend in de twee gevallen. Evenzo zou de kracht die nodig is om een touw met een bepaalde hoeveelheid uit te rekken enkel afhangen van de rek in het touw. Het is dit basisconcept van rek dat van deze definitie een nuttige keuze maakt.
Shearrek
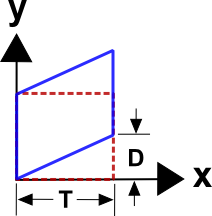
Shearrek wordt gewoonlijk voorgesteld door \(\gamma\) en gedefinieerd als
Dit is de shear-versie van de technische rek. Merk op dat in deze situatie wel enige rotatie van het starre lichaam optreedt, omdat het vierkant hier de neiging heeft tegen de wijzers van de klok in te draaien, maar we zullen deze complicatie voor nu negeren.
zuivere afschuifspanning
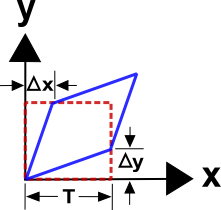
Een betere, maar iets complexere definitie van afschuifspanning is dus
waarbij wordt aangenomen dat het beginpunt ook een vierkant is. Er zij op gewezen dat de twee definities tot dezelfde resultaten leiden wanneer de verplaatsingen en spanningen klein zijn. Met andere woorden
Dit maakt het mogelijk te denken in termen van de eerste definitie terwijl men de tweede gebruikt.
Algemene definities
De bovenstaande definities zijn goed in die zin dat zij werken voor eenvoudige gevallen waarin alle rek het een of het ander is (normaal of afschuiving). Maar zodra de spanningscomponenten gelijktijdig aanwezig zijn voor \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}}, enz., kan het onhandelbaar worden. Er is dus een meer algemene berekeningsmethode nodig.
Het antwoord op dit dilemma is… calculus. De benadering is om de verschillende spanningen te definiëren in termen van partiële afgeleiden van het verplaatsingsveld, op een zodanige wijze dat de bovenstaande definities voor de eenvoudige gevallen behouden blijven.
Normale Spanningen
De normale spanningen zijn gedefinieerd als
Normale Spanningen
Het eenvoudige geval van eenassige rek kan worden beschreven als
en aangezien \({\bf u} = {\bf x} – {\bf X}}), kan met een beetje algebra
So
worden verkregen, waarmee de “delta L over L”-definitie wordt weergegeven zoals gewenst.
Shear spanning
De vergelijking voor afschuifspanning is
De coördinatenvergelijking voor het afschuifvoorbeeld is
En het verplaatsingsveld is
De afschuifspanning is
Dit geeft het gewenste resultaat voor dit eenvoudige geval: \De symmetrie van de vergelijking zorgt er ook voor dat de berekende afschuifwaarde ook voldoet aan het net-niet-rotatie criterium. De vergelijkingen voor dit voorbeeld zijn
afschuiving
en zij leiden tot
afschuiving
die weer het gewenste resultaat geeft.
2-D notatie
Spanning is, net als spanning, een tensor. En net als spanning is rek een tensor omdat het voldoet aan de standaard coördinatentransformatieprincipes van tensoren. Het kan worden geschreven in een van de volgende verschillende vormen. Ze zijn allemaal identiek.
\=gamma_{xy} = \gamma_{yx}\), kunnen alle tensoren ook geschreven worden als
=gamma_{xy} = \gamma_{yx}}.

Tensor afschuivingstermen
ZEER BELANGRIJK: De afschuivingstermen hier bezitten een eigenschap die alle straindefinities gemeen hebben en die een eindeloze bron van verwarring en vergissingen is. De afschuivingstermen in de spanningsensor zijn de helft van de technische waarden voor afschuifspanning die eerder zijn gedefinieerd als (gamma_{xy} = D / T). Dit is aanvaardbaar en zelfs noodzakelijk om coördinatentransformaties op de spanningstrekkers correct uit te voeren. Niettemin worden de tensorische afschuivingstermen geschreven als \(\epsilon_{ij}\) en zijn de helft van \(\gamma_{ij}\) zodanig dat
Het is altijd, altijd, altijd het geval dat als \(\gamma_{xy} = D / T = 0.10), dan zal de rektrekspanner
bevatten. Als alternatief, als de rektrekspanner
is, dan zal \(\gamma_{xy} = D / T = 0.04).
3-D Notatie
Alle bovenstaande conventies in 2-D gelden ook voor het 3-D geval. De notatie voor het 3-D geval is als volgt.
De uitsluiting van de rotaties van starre lichamen uit de spanningstensor leidt tot [gamma_{xy} = gamma_{yx}],[gamma_{xz} = gamma_{zx}], en [gamma_{yz} = gamma_{zy}].Dit levert ook symmetrische tensoren op.