
Wprowadzenie
Niniejsza strona przedstawia tak zwane definicje infinitesimal strain.Jest to trochę błędne określenie, ponieważ jak zobaczymy insmallstrain.html, to w rzeczywistości obroty muszą być małe, a nie same odkształcenia, aby dokładnie wykorzystać równania małych odkształceń.
Normalne odkształcenia
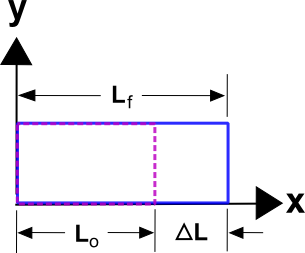
Normalne w normalnym odkształceniu nie oznacza powszechnego, lub zwykłego odkształcenia. Oznacza ono bezpośrednie, zmieniające długość rozciągnięcie (lub ściskanie) obiektu, wynikające z normalnego naprężenia. Jest ono powszechnie definiowane jako
gdzie wielkości są zdefiniowane na szkicu. Jest ono również znane jako odkształcenie inżynierskie. Zwróć uwagę, że gdy \aDelta L \) jest mała, to \aL_o \) będzie tak blisko \aL_f \), że specyfikacja jednego z nich w mianowniku \aDelta L / L \) jest w rzeczywistości niepotrzebna. Definicja ta wynika z faktu, że jeśli lina o długości 1 m zostanie pociągnięta i ulegnie zniszczeniu po rozciągnięciu o 0,015 m, to można oczekiwać, że lina o długości 10 m rozciągnie się o 0,15 m zanim ulegnie zniszczeniu. W każdym przypadku odkształcenie wynosi 0,015, czyli 1,5%, i jest wartością stałą, niezależną od długości liny, nawet jeśli Delta L’s ma różne wartości w obu przypadkach. Podobnie, siła potrzebna do rozciągnięcia liny o daną wartość zależałaby tylko od odkształcenia liny.To właśnie to podstawowe pojęcie odkształcenia sprawia, że ta definicja jest użyteczna.
Odkształcenie ścinające
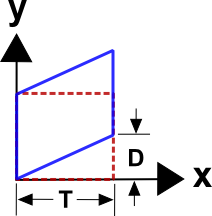
Odkształcenie ścinające jest zwykle reprezentowane przez \(\amma\) i definiowane jako
Jest to ścinająca wersja odkształcenia inżynierskiego.Zauważ, że ta sytuacja obejmuje pewną rotację ciała sztywnego, ponieważ kwadrat ma tendencję do obracania się w kierunku przeciwnym do ruchu wskazówek zegara, ale na razie pominiemy tę komplikację.
Czyste odkształcenia ścinające
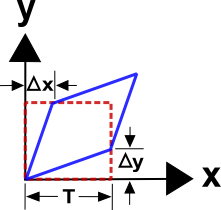
Więc lepszą, ale nieco bardziej złożoną definicją odkształcenia ścinającego, jest
, gdzie zakłada się, że punkt początkowy jest również kwadratem. Należy zauważyć, że te dwie definicje prowadzą do tych samych wyników, gdy przemieszczenia i odkształcenia są małe. Innymi słowy
pozwala to myśleć w kategoriach pierwszej definicji, podczas gdy używamy drugiej.
Definicje ogólne
Powyższe definicje są dobre w tym sensie, że działają dla prostych przypadków, w których wszystkie odkształcenia są jedno lub drugie (normalne lub ścinające). Ale gdy tylko składowe odkształcenia występują jednocześnie dla \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}}, itd. rzeczy mogą stać się nie do opanowania. Potrzebna jest więc bardziej ogólna metoda obliczeń.
Odpowiedzią na ten dylemat jest… rachunek. Podejście polega na zdefiniowaniu różnych naprężeń w kategoriach pochodnych cząstkowych pola przemieszczeń, w taki sposób, że powyższe definicje są zachowane dla prostych przypadków.
Przemieszczenia normalne
Przemieszczenia normalne definiuje się jako
Prosty przypadek jednoosiowego rozciągania można opisać jako
, a ponieważ \(\bf u} = \bf x} – \bf X}), można zastosować niewielką algebrę, aby otrzymać
So
, co odtwarza definicję „delty L nad L” zgodnie z życzeniem.
Odkształcenia ścinające
Równanie na odkształcenie ścinające to
Równanie odwzorowania współrzędnych dla przykładu ścinania to
A pole przemieszczenia to
Odkształcenie ścinające to
Odtwarza to pożądany wynik dla tego prostego przypadku: \(\amma_{xy} = D / T).
Symetria równania zapewnia również, że obliczona wartość ścinania również spełnia kryterium no-net-rotation. Równania odwzorowania współrzędnych dla tego przykładu to
i prowadzą one do
co ponownie daje pożądany wynik.
2-D Notacja
Odkształcenie, podobnie jak naprężenie, jest tensorem. I podobnie jak naprężenie, odkształcenie jest tensorem po prostu dlatego, że spełnia standardowe zasady transformacji współrzędnych tensorów. Wszystkie one są identyczne.
Ale ponieważ \(\gamma_{xy} = \gamma_{yx}), wszystkie tensory można również zapisać jako
Ustawienie \(\gamma_{xy} = \gamma_{yx}} skutkuje tym, że tensory odkształceń stają się (wymagając tego w rzeczywistości) symetryczne.

Wyrażenia tensorowe na ścinanie
BARDZO WAŻNE: Wyrażenia na ścinanie posiadają właściwość, która jest wspólna dla wszystkich definicji tensora i jest niekończącym się źródłem nieporozumień i błędów. Terminy ścinania w tensorze odkształceń są połową inżynierskich wartości odkształcenia ścinającego zdefiniowanych wcześniej jako D / T. Jest to dopuszczalne, a nawet konieczne w celu prawidłowego przeprowadzenia transformacji współrzędnych na tensorach odkształcenia. Niemniej jednak, tensorowe warunki ścinania są zapisywane jako \(\epsilon_{ij}} i stanowią połowę \(\gamma_{ij}}, tak że
jest zawsze, zawsze, zawsze tak, że jeśli \(\gamma_{xy} = D / T = 0.10), to tensor naprężenia będzie zawierał
Alternatywnie, jeżeli tensor naprężenia jest
to \(\gamma_{xy} = D / T = 0.04).
Notacja 3-D
Wszystkie powyższe konwencje w 2-D stosują się również do przypadku 3-D. Notacja dla przypadku 3-D jest następująca.
Wykluczenie obrotów ciała sztywnego z tensora odkształcenia prowadzi do tego, że tensor odkształcenia jest symetryczny (gamma_{xy} = gamma_{yx}), (gamma_{xz} = gamma_{zx}) oraz (gamma_{yz} = gamma_{zy}).W ten sposób powstają również tensory symetryczne.