
Introducere
Această pagină prezintă așa-numitele definiții ale deformației infinitezimale.Aceasta este o denumire puțin greșită, deoarece, după cum vom vedea, în cazul deformației mici.html, de fapt rotațiile sunt cele care trebuie să fie mici, nu deformațiile în sine, pentru a putea folosi cu precizie ecuațiile deformațiilor mici.
Deformații normale
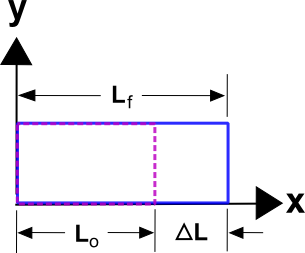
Normal în deformație normală nu înseamnă deformație comună, sau obișnuită. Înseamnă o întindere (sau compresie) cu schimbare directă a lungimii unui obiectrezultând dintr-o tensiune normală. Ea este definită în mod obișnuit ca
\
unde cantitățile sunt definite în schiță. Este cunoscută, de asemenea, sub numele de deformație inginerească. Rețineți că atunci când \(\(\Delta L\) este mică, atunci \(L_o\) va fi atât de apropiată de \(L_f\) încât specificarea oricăreia dintre ele în numitorul lui \(\Delta L / L\) este de fapt inutilă. Se va presupune că acesta va fi cazul pe parcursul acestei pagini.
Definiția rezultă din faptul că, dacă o frânghie de 1 m este trasă și cedează după ce se întinde 0,015 m, atunci ne așteptăm ca o frânghie de 10 m să se întindă 0,15 m înainte de a ceda. În fiecare caz, deformația este\(\epsilon\) = 0,015, sau 1,5%, și este o valoare constantă, independentă de lungimea frânghiei, chiar dacă \(\Delta L’s\) sunt valori diferite în cele două cazuri. De asemenea, forța necesară pentru a întinde o frânghie cu o anumită valoare ar depinde doar de tensiunea din frânghie.Acest concept de bază al tensiunii este cel care face ca această definiție să fie o alegere utilă.
Deformația de forfecare
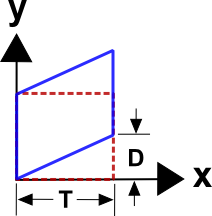
Deformația de forfecare este de obicei reprezentată prin \(\gamma\) și definită ca
\
Aceasta este versiunea de forfecare a deformației inginerești.Rețineți că această situație include o anumită rotație a corpului rigid, deoarece pătratul tinde să se rotească în sens invers acelor de ceasornic aici, dar vom ignora această complicație deocamdată.
Deformații de forfecare pură
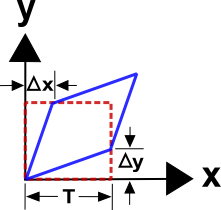
Atunci o definiție mai bună, dar puțin mai complexă a deformației de forfecare, este
\
unde se presupune că punctul de plecare este tot un pătrat. Trebuie remarcat faptul că cele două definiții conduc la aceleași rezultate atunci când deplasările și deformațiile sunt mici. Cu alte cuvinte
\
Aceasta permite să se gândească în termenii primei definiții în timp ce se folosește cea de-a doua.
Definiții generale
Definițiile de mai sus sunt bune în sensul că funcționează pentru cazuri simpleîn care toată deformația este una sau alta (normală sau de forfecare). Dar de îndată ce componentele deformației sunt prezente simultan pentru \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\), etc.,lucrurile pot deveni imposibil de gestionat. Deci este nevoie de o metodă de calcul mai generală.
Răspunsul la această dilemă este… calculul. Abordarea este de a defini diversele deformații în termeni de derivate parțiale ale câmpului de deplasare, \({\bf u({\bf X})}\),în așa fel încât definițiile de mai sus să fie păstrate pentru cazurile simple.
Deformațiile normale
Deformațiile normale sunt definite ca
\
Cazul simplu de întindere uniaxială poate fi descris ca
\
și din moment ce \({\bf u} = {\bf x} – {\bf X}\), se poate aplica puțină algebră pentru a obține
\
Deci
\
care reproduce definiția „delta L peste L” așa cum se dorește.
Deformațiile de forfecare
Ecuația pentru deformația de forfecare este
\
Ecuația de cartografiere a coordonatelor pentru exemplul de forfecare este
\
Și câmpul de deplasare este
\
Deformația de forfecare este
\
Aceasta reproduce rezultatul dorit pentru acest caz simplu: \(\gamma_{xy} = D / T\).
Simetria ecuației asigură, de asemenea, că valoarea de forfecare calculată satisface, de asemenea, criteriul fără rotire netă. Ecuațiile de cartografiere a coordonatelor pentru acest exemplu sunt
\
și conduc la
\
care produce din nou rezultatul dorit.
Notație 2-D
Deformația, ca și tensiunea, este un tensor. Și, la fel ca și tensiunea, deformația este un tensor pur și simplu pentru că se supune principiilor standard de transformare a coordonatelor tensorilor.Ea poate fi scrisă în oricare dintre cele câteva forme diferite, după cum urmează. Toate sunt identice.
\=\left=\left\]
Dar din moment ce \(\gamma_{xy} = \gamma_{yx}\), toți tensorii pot fi, de asemenea, scriși sub forma
\=\left=\left\]
Stabilirea \(\gamma_{xy} = \gamma_{yx}\) are efectul de a face simetrici (cerând de fapt) tensorii de deformație.

Termeni de forfecare a tensorilor
FOARTE IMPORTANT: Termenii de forfecare de aici posedă o proprietate care este comună tuturor definițiilor drepte și care este o sursă nesfârșită de confuzii și greșeli. Termenii de forfecare din tensometru sunt jumătate din valorile tehnice ale tensiunii de forfecare definite anterior ca\(\gamma_{xy} = D / T\). Acest lucru este acceptabil și chiar necesar pentru a efectua corect transformările de coordonate asupra tensorilor de deformație. Cu toate acestea, termenii tensioactivi de forfecare se scriu ca \(\epsilon_{ij}\) și sunt jumătate din \(\gamma_{ij}\) astfel încât
\
Este întotdeauna, întotdeauna, întotdeauna, întotdeauna cazul că dacă \(\gamma_{xy} = D / T = 0.10\), atunci tensorul de deformație va conține
\\]
Alternativ, dacă tensorul de deformație este
\\\]
atunci \(\gamma_{xy} = D / T = 0,04\).
Notație 3-D
Toate convențiile de mai sus în 2-D se aplică și în cazul 3-D. Notația pentru cazul 3-D este următoarea.
\=\left=\left\]
Excluderea rotațiilor corpului rigid din tensorul de deformare conduce la\(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\), și\(\gamma_{yz} = \gamma_{zy}\).Aceasta produce, de asemenea, tensori simetrici.
\=\left=\left\]
.