
Introduktion
Denna sida presenterar de så kallade infinitesimala strain-definitionerna.Detta är en lite felaktig benämning eftersom vi kommer att se att insmallstrain.html är det faktiskt rotationer som måste vara små, inte själva belastningarna, för att man ska kunna använda ekvationerna för små belastningar på ett korrekt sätt.
Normala belastningar
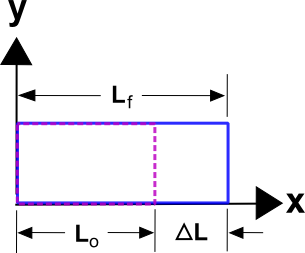
Normalt i normal belastning betyder inte vanlig eller vanlig belastning. Det betyder en direkt längdförändrande sträckning (eller kompression) av ett föremål som är resultatet av en normalspänning. Den definieras vanligen som
\
där storheterna definieras i skissen. Detta är också känt som ”Engineering Strain” (teknisk töjning). Observera att när \(\Delta L\) är liten kommer \(L_o\) att ligga så nära \(L_f\) att det faktiskt är onödigt att ange någon av dem i nämnaren för \(\Delta L / L\). Detta kommer att antas vara fallet genom hela denna sida.
Definitionen kommer från det faktum att om ett 1 m långt rep dras och brister efter att ha sträckt sig 0,015 m, så skulle vi förvänta oss att ett 10 m långt rep sträcker sig 0,15 m innan det brister. I båda fallen är töjningen\(\epsilon\) = 0,015, eller 1,5 %, och är ett konstant värde oberoende av repets längd, även om \(\Delta L’s\) är olika värden i de två fallen. På samma sätt skulle den kraft som krävs för att sträcka ett rep med en viss mängd bero enbart på spänningen i repet.Det är detta grundläggande begrepp om spänning som gör att denna definition är ett användbart val.
Skjuvspänning
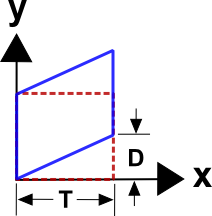
Skjuvspänning representeras vanligen av \(\gamma\) och definieras som
\
Detta är skjuvversionen av teknisk spänning.Observera att den här situationen innefattar en viss rotation av den stela kroppen eftersom kvadraten har en tendens att rotera moturs, men vi kommer att strunta i denna komplikation för tillfället.
Rena skjuvspänningar
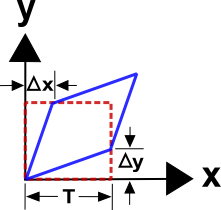
En bättre, men något mer komplicerad definition av skjuvspänningar, är
\
där det antas att utgångspunkten också är en kvadrat. Det bör noteras att de två definitionerna leder till samma resultat när förskjutningarna och töjningarna är små. Med andra ord
\
Detta gör att man kan tänka i termer av den första definitionen samtidigt som man använder den andra.
Allmänna definitioner
De ovanstående definitionerna är bra i det avseendet att de fungerar för enkla fall där all belastning är den ena eller den andra (normal eller skjuvning). Men så snart som de olika belastningskomponenterna är närvarande samtidigt för \(\epsilon_x, \epsilon_y, \epsilon_z, \gamma_{xy}\), etc., kan saker och ting bli oöverskådliga. Så det behövs en mer allmän beräkningsmetod.
Svaret på detta dilemma är… kalkyl. Metoden är att definiera de olika belastningarna i termer av partiella derivat av förskjutningsfältet, \({\bf u({\bf X})}\), på ett sådant sätt att ovanstående definitioner bevaras för de enkla fallen.
Normala töjningar
Normala töjningar definieras som
Det enkla fallet med enaxlig sträckning kan beskrivas som
och eftersom \({\bf u} = {\bf x} – {\bf X}\), kan lite algebra tillämpas för att ge
So
som återger ”delta L över L”-definitionen som önskat.
Skjuvspänningar
Ekvationen för skjuvspänning är
\
Koordinatmappningsekvationen för skjuvexemplet är
\
Och förskjutningsfältet är
\
Skjuvspänningen är
\
Det här reproducerar det önskade resultatet för detta enkla fall:
Symmetrin i ekvationen säkerställer också att det beräknade skjuvningsvärdet också uppfyller kriteriet om ingen nettorotation. Koordinatavbildningssekvationerna för detta exempel är
\
och de leder till
\
som återigen ger det önskade resultatet.
2-D-notation
Strängningen är, liksom spänningen, en tensor. Och liksom spänning är töjning en tensor helt enkelt för att den följer standardprinciperna för koordinattransformationer för tensorer.Den kan skrivas i någon av flera olika former enligt följande. De är alla identiska.
\=\left=\left\]
Men eftersom \(\gamma_{xy} = \gamma_{yx}\), kan alla tensorer också skrivas som
\=\left=\left\]
Sätta \(\gamma_{xy} = \gamma_{yx}\) har effekten av att göra (kräver i själva verket) att töjningstensorerna är symmetriska.

Tensors skjuvtermer
MYCKET VIKTIGT: Skjuvtermerna här har en egenskap som är gemensam för alla straindefinitioner och är en oändlig källa till förvirring och misstag. Skjuvningstermerna i straintensorn är hälften av de tekniska värden för skjuvspänning som tidigare definierats som\(\gamma_{xy} = D / T\). Detta är acceptabelt och till och med nödvändigt för att korrekt utföra koordinattransformationer på töjningstenorerna. Tensoriska skjuvningstermer skrivs dock som \(\epsilon_{ij}\) och är hälften av \(\gamma_{ij}\) så att
\
Det är alltid, alltid, alltid, alltid fallet att om \(\gamma_{xy} = D / T = 0.10\), så kommer töjningsspänningen att innehålla
\\\]
Alternativt, om töjningsspänningen är
\\]
då är \(\gamma_{xy} = D / T = 0.04\).
3-D Notation
Alla ovanstående konventioner i 2-D gäller också för 3D-fallet. Notationen för 3D-fallet är följande.
\=\left=\left\]
Uttryckandet av rigida kroppsrotationer från töjningsspänningen leder till\(\gamma_{xy} = \gamma_{yx}\),\(\gamma_{xz} = \gamma_{zx}\), och\(\gamma_{yz} = \gamma_{zy}\).Detta ger också symmetriska tensorer.
\=\left=\left\]